Comment imaginer des cartes et des blocs pour apprendre à programmer sans ordinateur ?
Dans cet article, nous allons vous présenter les cartes exploratoires que nous avons imaginé avant de proposer KodtonPote.
Nous allons passer sur la version qui était trop inspirée directement de Scratch. Nous l’avons abandonée parce qu’elle était trop proche de Scratch, mais surtout difficile à découper et à manipuler, donc à mettre en œuvre.
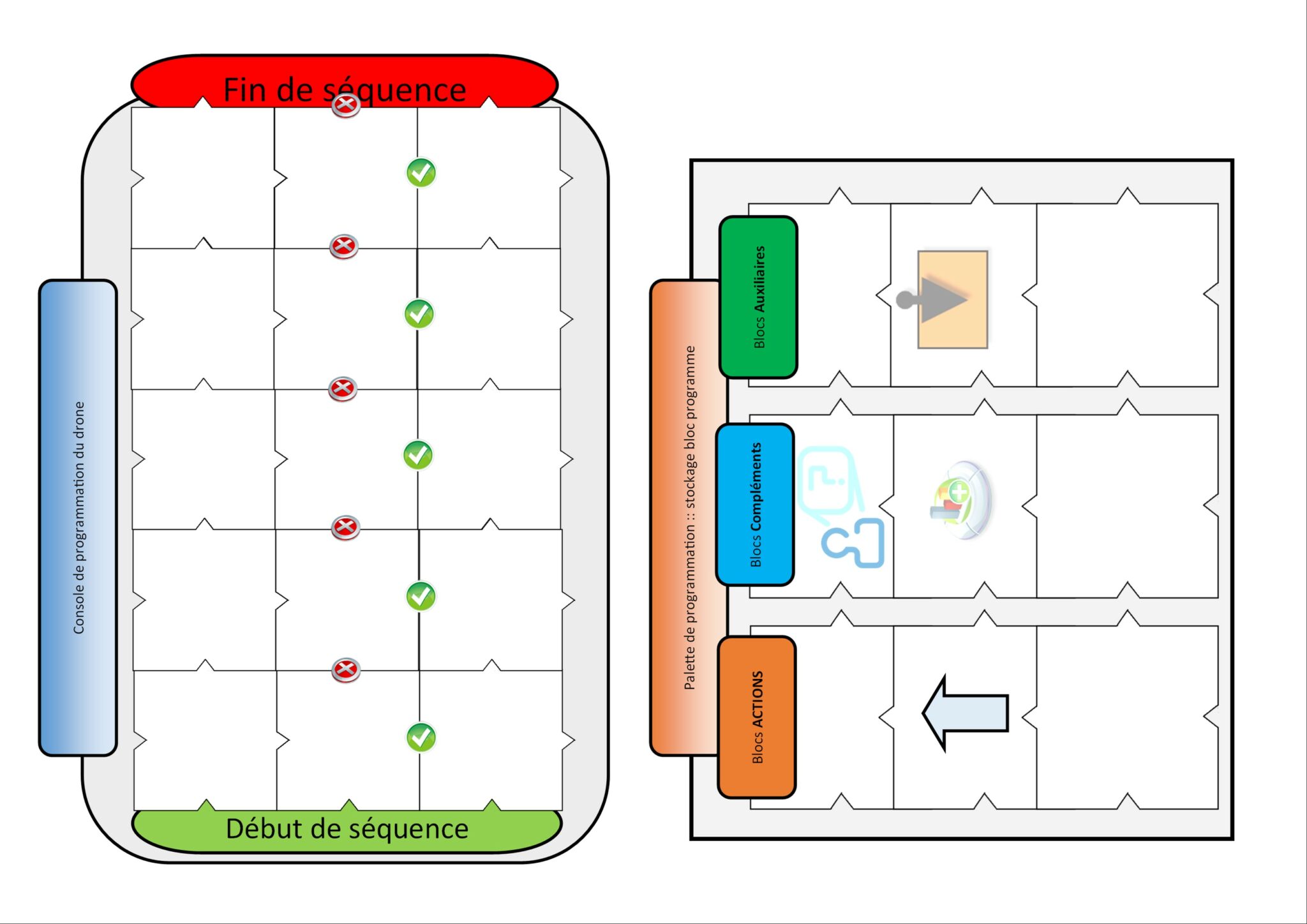
Voici la première version présentée est à base de pions.
Interface de programmation à base de blocs carrés

Des “ergots” indiquent comment les assembler entre eux.
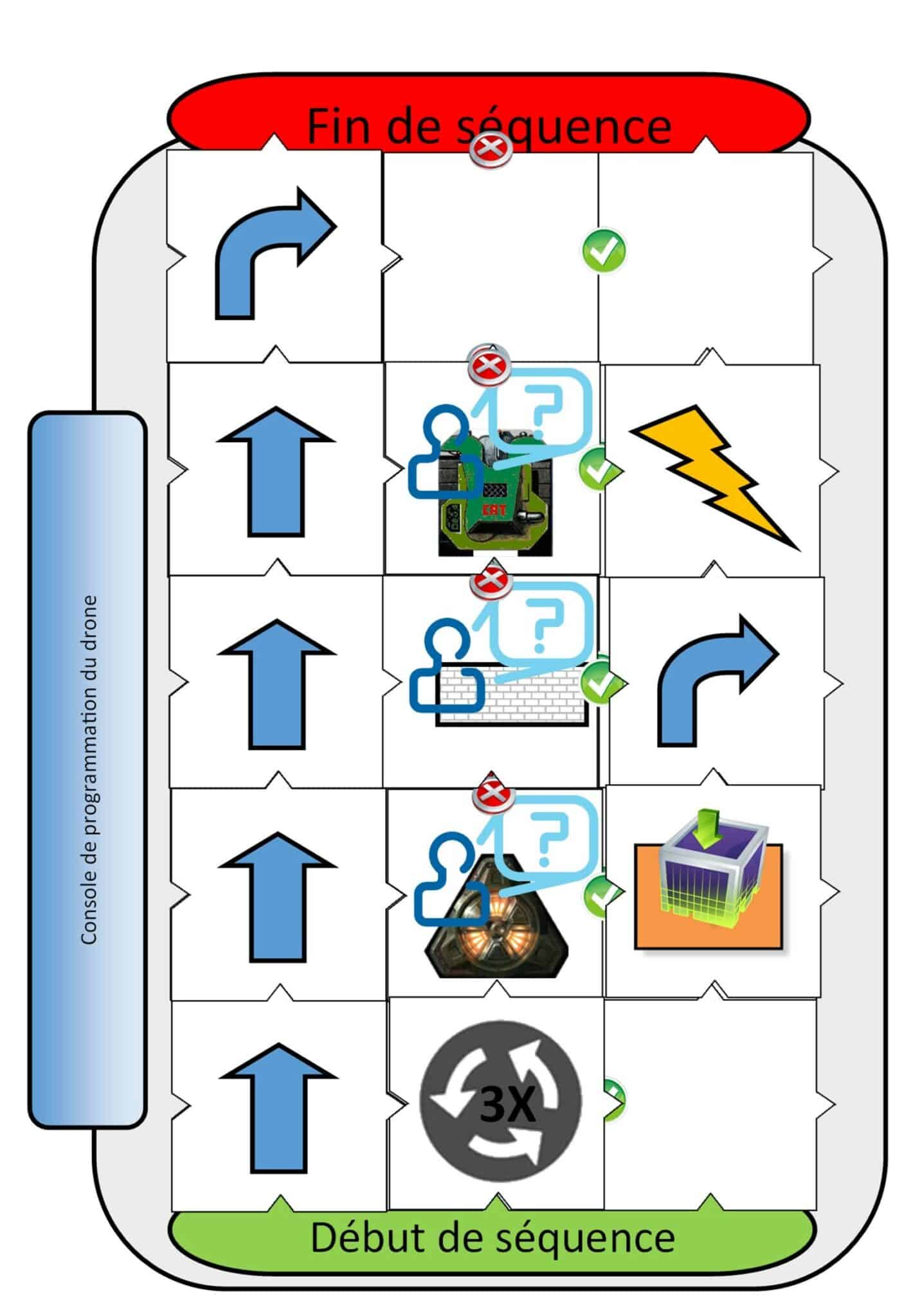
Ensuite, vous placez vos blocs programmes sur la tablette de programmation ci-dessous.
Ensuite, il nous fallait trouver un moyen de visualiser le codage binaire.

C’est jolie, mais cela ne nous servira pas à grand-chose.
Concrètement, nous avons besoin d’exemple de programmes pour vérifier l’ergonomie de notre proposition.
Interface de programmation à base d’hexagone
Nous avons ensuite voulu orienter nos recherches avec une interface à base d’hexagone. Cela nous semblait plus innovant et pouvait ouvrir de nouvelles perspectives.
Voici les groupes de blocs de programmes hexagonaux.
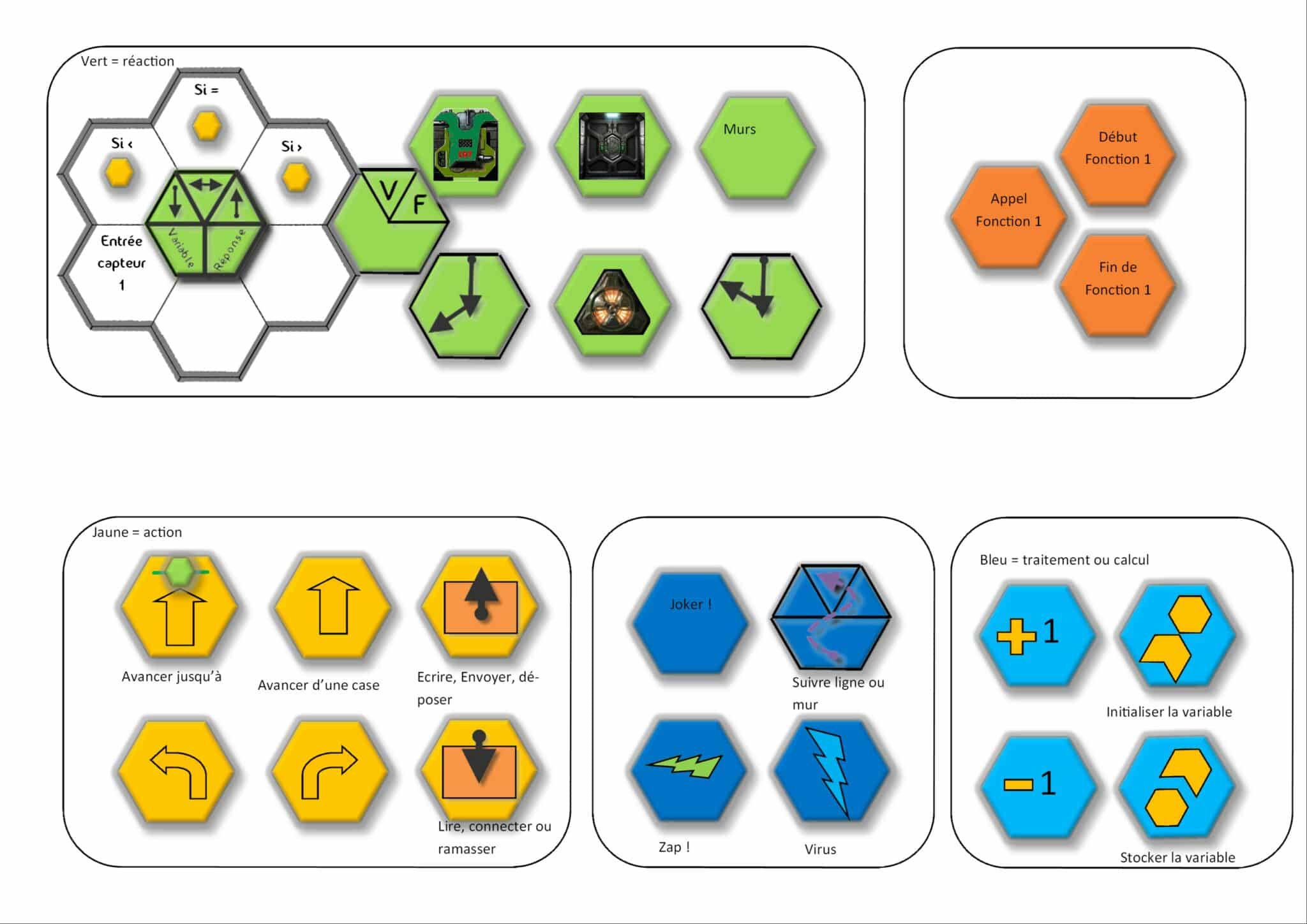
Comment les agencer et le faire interagir. Le schéma ci-dessous, présente quelques possibilités d’interactions entre les blocs.

Il faut maintenant une tablette pour recevoir et assembler ces blocs de programmations.
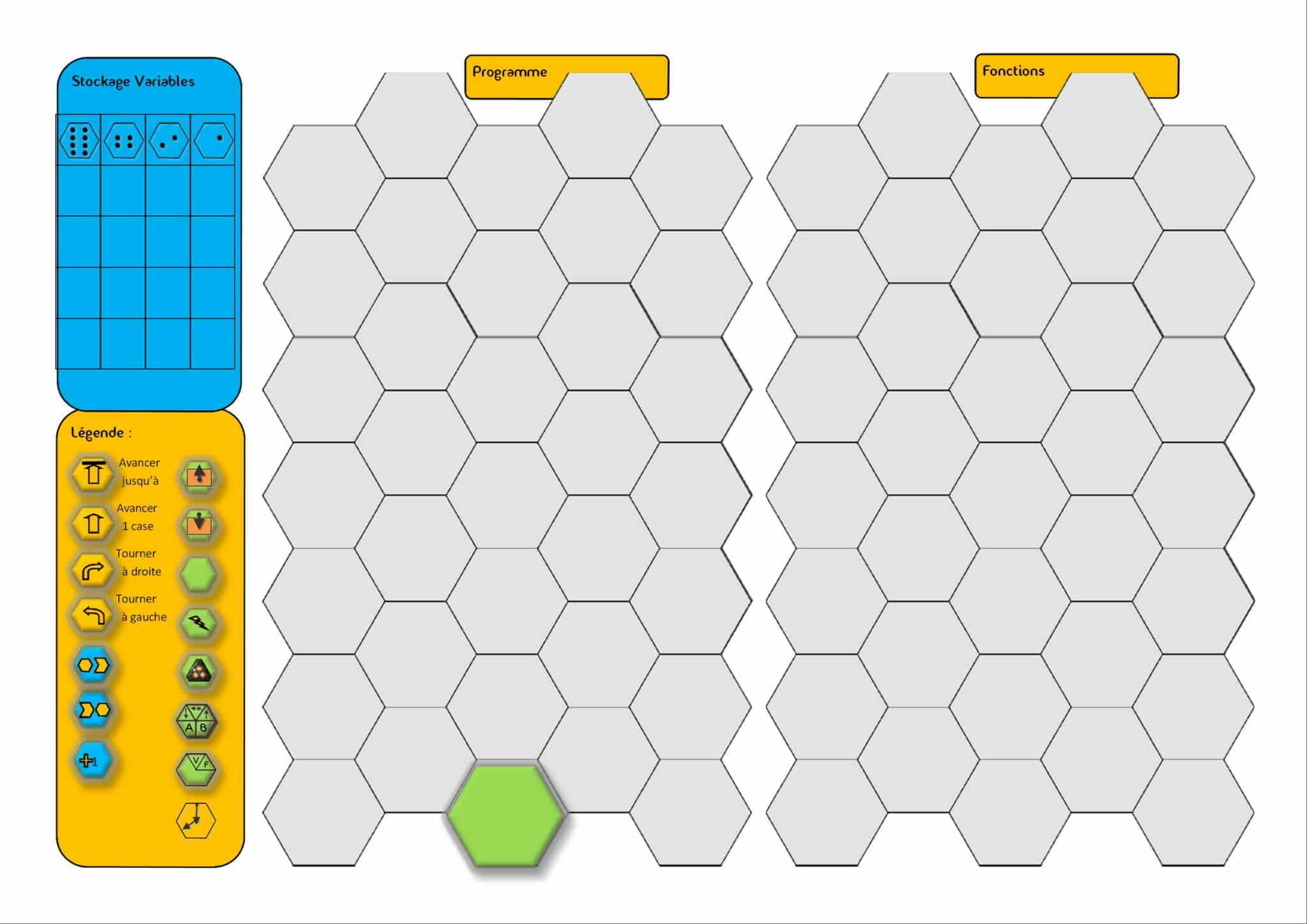
Le rendu est sympathique, mais pas autoporteur.
Si nous avons effectué toutes ces recherches, c’est parce qu’il existait aussi des jeux où il fallait programmer son robot sur un plateau de jeu.
En voulant nous éloigner du plateau de jeu et de ses pions, nous en sommes arrivés aux cartes.
Nous avions trouvé Cody Roby. Mais le mode de jeu ne nous satisfaisait pas. Ce que nous cherchions était un dispositif qui nous permette de mettre en œuvre les métalgorithmes.
Les métalgorithmes.
Un « métalgorithme » peut-être considéré comme une métaphore d’algorithme. Il permet d’explorer un processus. Processus naturel comme l’écoulement de l’eau ou processus artificiel comme les étapes à suivre par le pilote pour faire décoller son avion. Ils jouent un rôle important dans l’approche TeamStorms parce qu’ils fournissent un contexte.
En voulant faire faire un parcours à son robot, pour lui faciliter la tâche, nous allons faire appel à son intelligence kinesthésique. On demande à l’apprenant de se mettre à la place du robot. On créé une syntonie corporelle. C’est-à-dire qu’on lui permet de se mettre en accord avec ce qu’il ressent de son propre corps, un être doué d’intention, de buts, de désirs. Ceci offre un appui pour d’autres apprentissages. La programmation de robot permet de redécouvrir des principes mathématiques (avec la relation temps/distance/vitesse par exemple) et géométriques (élaboration d’un système de repérage).
C’est donc ainsi que nous sommes arrivés à : kodtonpote-programmer-en-mode-deconnecte
