Introduction aux LEGO Mindstorms EV3 version EDU
La section Brick des Brickodeurs utilise la version EDU des LEGO Minsdtorms. Ce n’est pas la version que l’on trouve dans le commerce mais la version vendu par : 
Introduction
Le Lego Mindstorms EV3 est la troisième génération de brique programmable Mindstorms:
1998: LEGO MINDSTORMS (RCX)
2006: LEGO MINDSTORMS NXT
2013: LEGO MINDSTORMS EV3

Trois générations de briques programmables: RCX (gauche), NXT (centre), EV3 (droite)1
Chaque génération de brique a été déclinée en plusieurs versions. Ainsi le NXT a existé sous forme de NXT, NXT 2.0 et NXT Education Base Set (abrégé EDU).

Les différentes versions de NXT: NXT (gauche), NXT 2.0 (centre) et NXT Education Base Set (droite)
Le Lego Mindstorms EV3 existe ainsi sous deux versions: la version grand public (ref. 31313), et la version éducation (ref. 45544): Lego Mindstorms EV3 (gauche) et Lego Mindstorms EV3 Education (droite)
Lego Mindstorms EV3 (gauche) et Lego Mindstorms EV3 Education (droite)
La version éducation diffère de la version grand public par les points suivants:
- moins de pièces
- batterie fournie (mais pas le chargeur)
- le capteur infrarouge et sa télécommande sont remplacés par un capteur à ultrason capteur gyroscopique supplémentaire
- boîte à compartiments pour le rangement des pièces pas de logiciel inclus
- Une boîte d’extension (ref. 45560) apporte des pièces mécaniques supplémentaires, de manière à pouvoir réaliser les modèles de la boîte grand public.
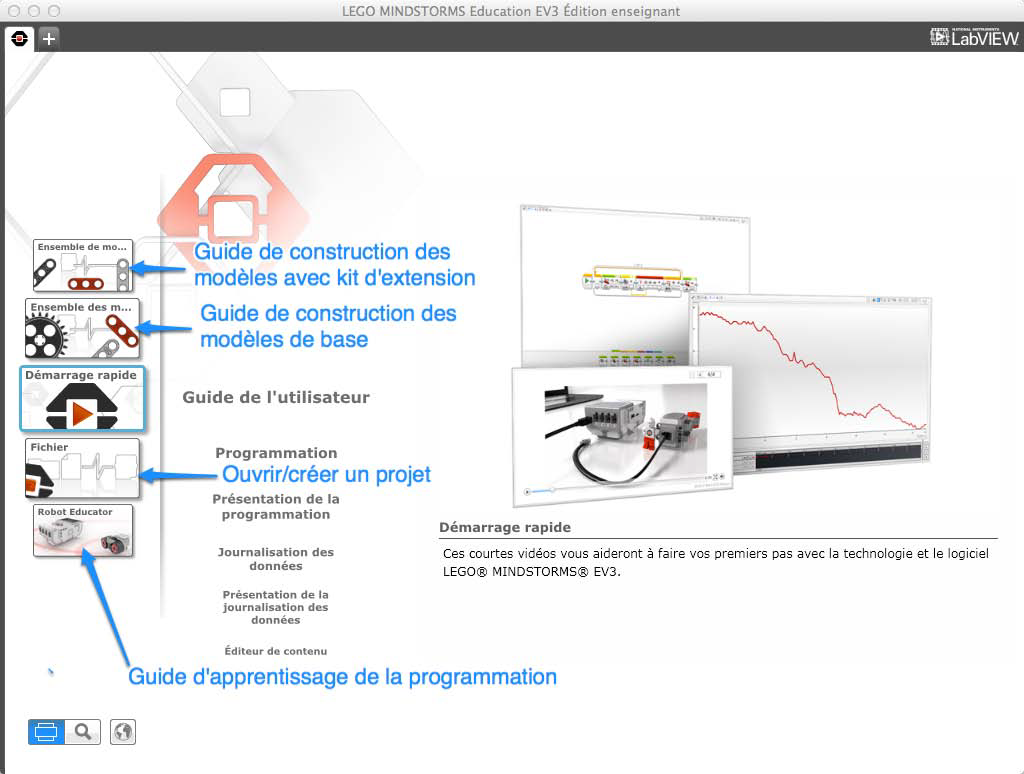
Il existe deux versions du logiciel MINDSTROMS EV3. Celle que tu vas employer ici est la version EDUCATOR qui comporte des leçons didactiques pour apprendre à programmer. L’autre version est celle du commerce qui ne comporte pas les leçons pour apprendre la programmation, mais des modes d’emploi pour construire des robots et des programmes déjà réalisés.
Néanmoins, le fonctionnement des deux logiciels est le même. Si tu apprends à programmer sur la version EDUCATOR, tu pourras utiliser sans problème le logiciel de la version du commerce.
Présentation du matériel
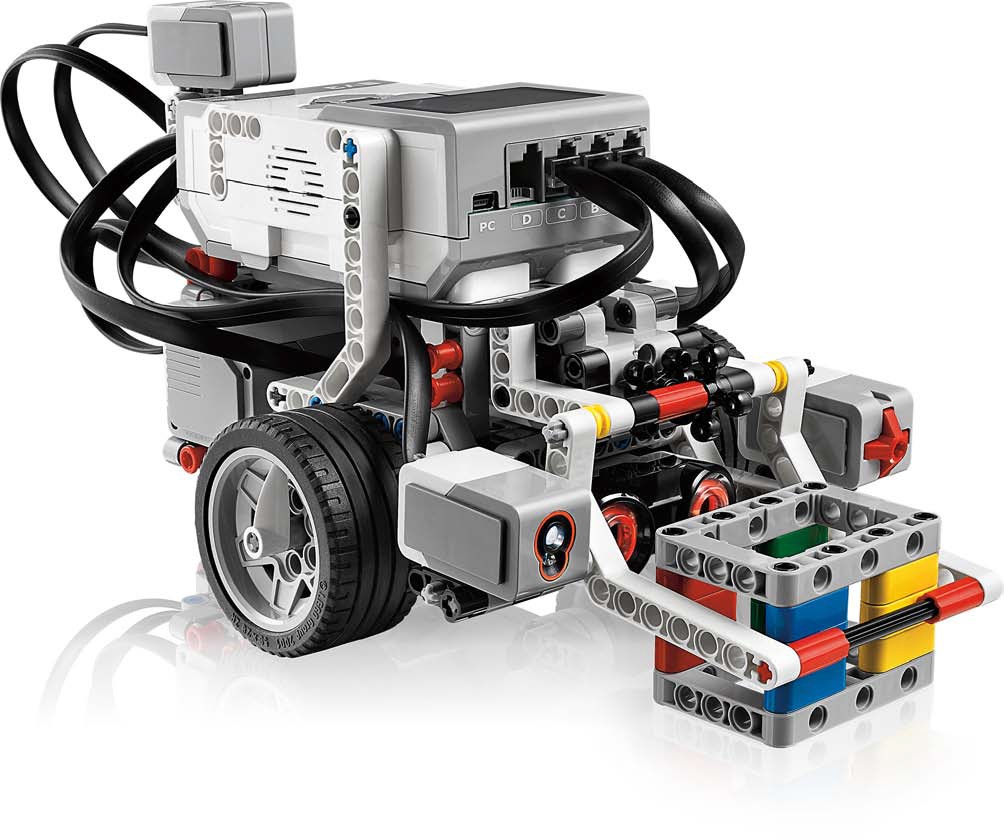
 On distingue 3 composants principaux = la brique EV3 + les moteurs + les capteurs
On distingue 3 composants principaux = la brique EV3 + les moteurs + les capteurs
Ce sont ces composants qui permettront aux robots que tu vas construire d’agir et de réagir.
La brique EV3
Caractéristiques techniques de la brique EV3
Système d'exploitation: LINUX
Processeur: ARM9 300 MHz
Mémoire flash: 16 Mo
Mémoire vive: 64 Mo
Résolution de l'écran: 178x128/noir & blanc
La brique est l’ordinateur qui commande le robot. Les moteurs et les capteurs s’y connectent.
Présentation des boutons
Un écran permet de visualiser les informations et son état (programme en cours, allumage, extinction…) et plusieurs boutons permettent de sélectionner les programmes ou les fonctions.
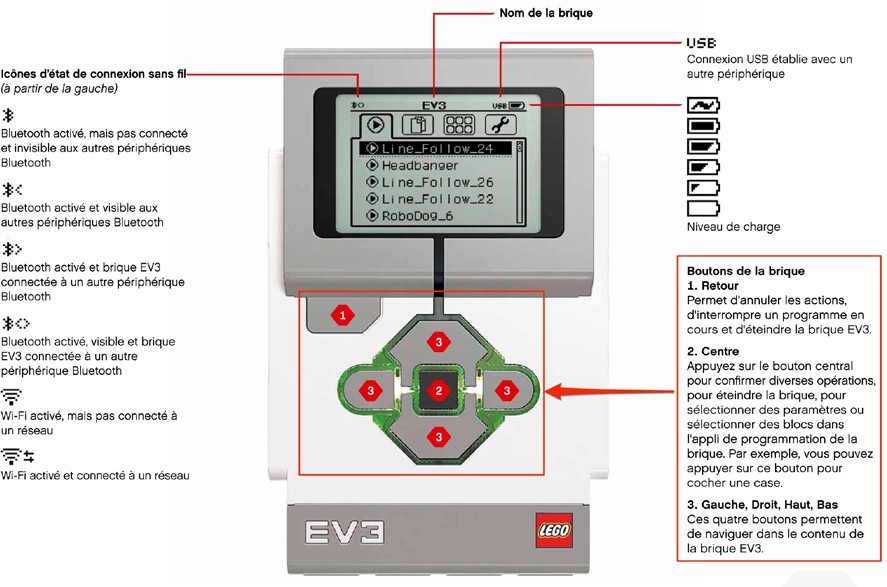
Présentation des lumières d’état
Le témoin lumineux d’état de la brique qui entoure les boutons indique l’état actuel de la brique EV3. Il peut être vert, orange ou rouge et il peut clignoter. Voici les codes du témoin d’état de la brique:
Rouge: démarrage, mise à jour, arrêt => Rouge clignotant: occupé
Orange: alerte, prêt => Orange clignotant: alerte, en cours d’exécution
Vert: prêt => Vert clignotant: programme en cours d’exécution

Mise en marche de la brique EV3
 Pour allumer la brique EV3, appuie sur le bouton central. Pendant le démarrage, le bouton devient rouge. Lorsque le bouton est vert, la brique est prête à être utilisée.
Pour allumer la brique EV3, appuie sur le bouton central. Pendant le démarrage, le bouton devient rouge. Lorsque le bouton est vert, la brique est prête à être utilisée.
Pour éteindre la brique EV3, appuie sur le bouton Retour
jusqu’à ce que l’écran d’extinction s’affiche.
L’option d’annulation X est déjà sélectionnée. Appuie sur le bouton droit pour sélectionner l’option de confirmation, puis appuie sur le bouton central pour confirmer.
La brique s’éteint automatiquement si elle n’est pas utilisée durant un temps déterminé (par défaut: 30 min).
Présentation des connecteurs
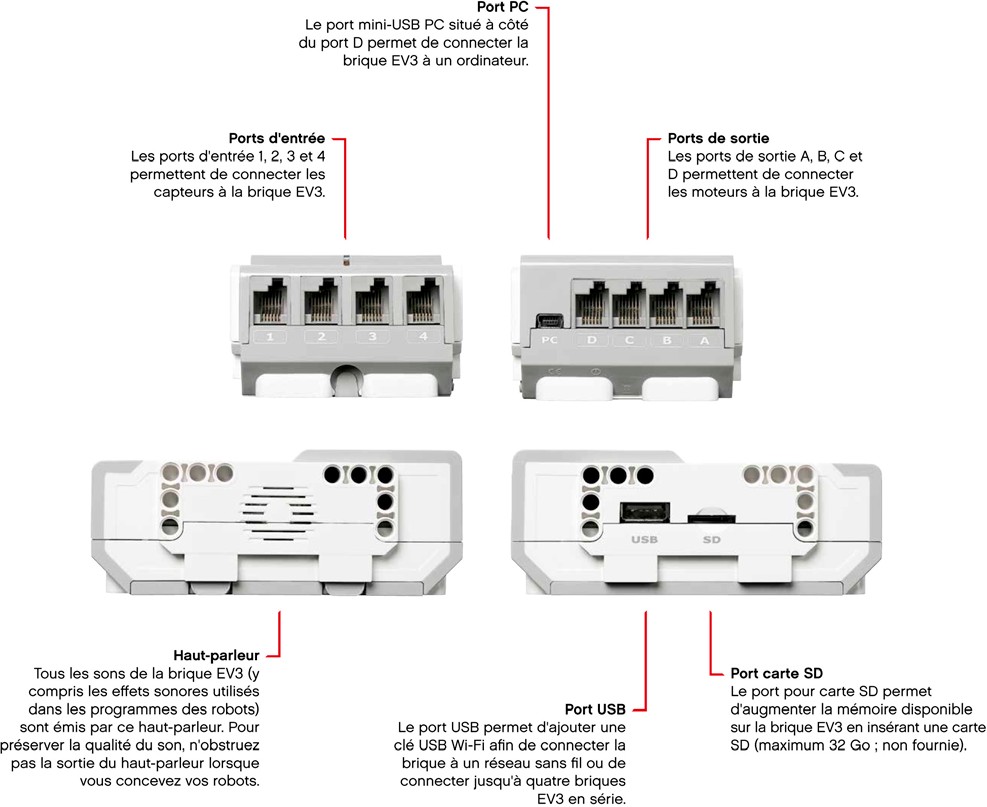
Les moteurs se branchent toujours sur les ports A, B, C et D. Les capteurs se branchent toujours sur les ports 1, 2, 3 et 4.
Attention! Les fiches sont fragiles!
Les moteurs EV3
Les moteurs EV3 sont à la fois des moteurs et des capteurs. Ils sont en effet équipés de capteurs de rotation précis au degré près. Par exemple, il est possible de programmer une rotation de 48°.
Le Mindstorms EV3 est équipé de 3 moteurs: deux grands moteurs et un moteur moyen.
Grands moteur
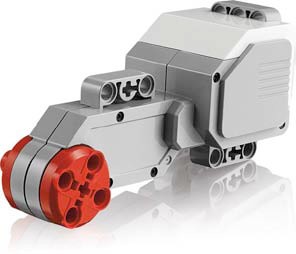
Le grand moteur est un moteur plus puissant, mais moins rapide. Il sera utilisé en priorité pour le déplacement des robots.
Le grand moteur tourne à un régime de 160-170 tours par minute (tpm), avec un couple en rotation de 20 newtons- centimètres (Ncm) et un couple de blocage de 40 Ncm.
Pour simplifier, le couple est l’effort que le moteur est capable de fournir en rotation autour d’un axe. C’est donc la force que le moteur est capable de donner dans son mouvement. Par exemple, lorsqu’un cycliste appuie davantage sur les pédales pour monter une côte ou pour accélérer, il développe davantage de couple.
Moteur moyen

Le moteur moyen est un moteur moins puissant, mais plus rapide. Il est aussi plus léger. Il sera utilisé lorsqu’on aura besoin d’une réaction plus rapide qu’avec le gros moteur.
Le moteur moyen tourne à un régime de 240-250 tpm, avec un couple en rotation de 8 Ncm et un couple de blocage de 12 Ncm.
Note: il n’existe pas de petit moteur.
Les capteurs EV3
Le capteur de couleurs

Le capteur de couleur peut détecter les couleurs ou l’intensité de la lumière. Trois modes d’utilisation sont disponibles:
- Couleur
- Intensité de la lumière réfléchie
- Intensité lumineuse ambiante.
En mode Couleur, le capteur reconnaît sept couleurs (noir, bleu, vert, rouge, jaune, blanc et marron).
En mode Intensité de la lumière réfléchie, le capteur mesure l’intensité de la lumière réfléchie en émettant une lumière rouge. Le capteur utilise une échelle allant de 0 (très sombre) à 100 (très clair).
En mode Intensité lumineuse ambiante, le capteur mesure l’intensité de la lumière ambiante (p. ex. la lumière du jour ou le faisceau d’une lampe torche) qui pénètre par la fenêtre. Le capteur utilise une échelle allant de 0 (très sombre) à 100 (très lumineux).
Tu peux utiliser le capteur de couleur pour suivre une ligne au sol, ou pour trier des boules de couleurs.
Conseil d’utilisation: place le capteur perpendiculairement à la surface à mesurer.
Le capteur tactile

Le capteur tactile est un capteur analogique qui détecte quand son bouton rouge est enfoncé et relâché. Il peut être programmé pour définir une action en utilisant trois possibilités:
- Enfoncé
- Relâché
- Heurté (enfoncé puis relâché)
Tu peux utiliser le capteur tactile comme un interrupteur, ou pour arrêter le robot quand il rencontre un obstacle
Le capteur gyroscopique

 Le capteur gyroscopique détecte le mouvement de rotation sur un seul axe. Quand vous faites tourner le capteur gyroscopique dans le sens des flèches (sur le boîtier du capteur), le capteur détecte la vitesse de rotation en degrés par seconde (la vitesse maximale que le capteur peut mesurer est de 440 degrés par seconde). Il mémorise aussi l’angle de rotation total en degrés.
Le capteur gyroscopique détecte le mouvement de rotation sur un seul axe. Quand vous faites tourner le capteur gyroscopique dans le sens des flèches (sur le boîtier du capteur), le capteur détecte la vitesse de rotation en degrés par seconde (la vitesse maximale que le capteur peut mesurer est de 440 degrés par seconde). Il mémorise aussi l’angle de rotation total en degrés.
Tu peux donc utiliser ce capteur pour détecter si une pièce est en mouvement. Tu peux aussi l’utiliser pour faire tourner le robot sur lui- même jusqu’à ce qu’il atteigne la valeur voulue; par exemple 90°. La précision est de +/- 3 degrés.
Conseil d’utilisation: le capteur ne doit pas bouger lorsqu’il est connecté à la brique EV3.
Le capteur à ultrasons

Le capteur à ultrasons mesure la distance des objets se trouvant devant lui. Il émet des ondes sonores à haute fréquence et mesure le temps qu’il faut au son pour être réfléchi et revenir au capteur. Les chauves-souris et les dauphins utilisent la même méthode pour chasser. C’est l’écholocalisation.
Le capteur peut mesurer une distance comprise entre 3 et 250 centimètres (avec une précision de +/-1 cm). Le témoin
allumé autour de l’œil du capteur indique que le capteur est en mode Mesure. Le témoin clignotant indique que le capteur est en mode Présence.
En mode Présence, le capteur peut détecter un autre capteur à ultrasons qui fonctionne à proximité; le capteur détecte les signaux sonores, mais il n’en émet pas, comme le sonar d’un sous-marin.
Tu peux utiliser le capteur à ultrasons pour éviter des obstacles, suivre une cible mobile ou détecter un mouvement.
Les pièces
Il est important d’avoir un vocabulaire commun pour se comprendre, en particulier pour nommer les nombreuses pièces qui constituent le Mindstorms EV3.
Tu trouveras la liste des pièces ainsi que leur nom à l’adresse suivante: http://00.lc/l9 Beaucoup de pièces (barres, axes…) existent dans des longueurs différentes. L’unité de mesure s’appelle le module (abrégée M) et correspond à une pièce de 1×1.
Exemples: brique 1x1M (rouge) et brique 1x2M (jaune)
Voici les principales familles de pièces:
|
|
Les bagues |
|
|
Les chevilles |
|
|
Les connecteurs |
|
|
Les axes |
|
|
Les poutres |
|
|
Les briques |
|
|
Les barres perforées |
|
|
Les roues dentées et engrenages |


L’interface de programmation
Lorsque tu ouvres le programme LEGO MINDSTORMS Education EV3, voici ce que tu obtiens:
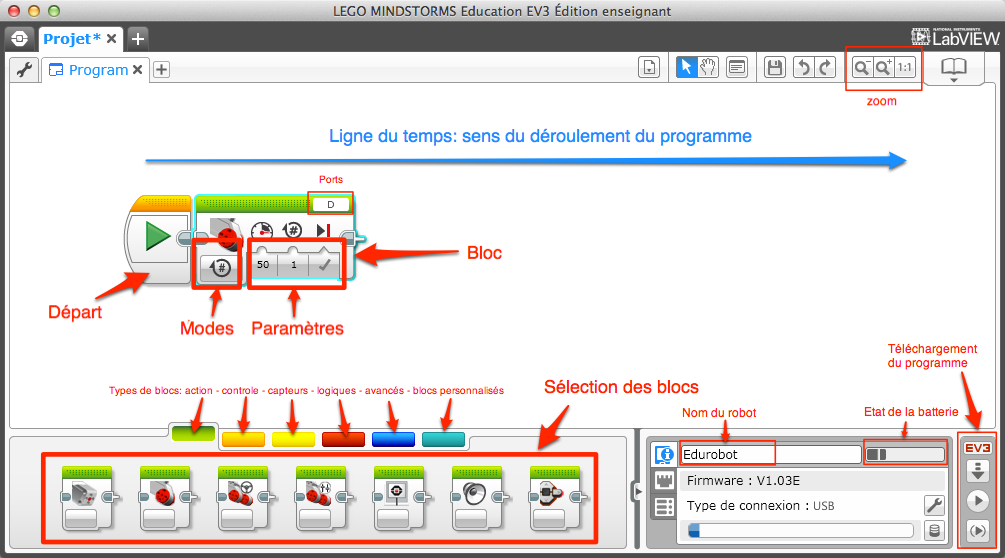
Voici l’interface de programmation:
Voilà pour aujourd’hui. Vous avez eu un aperçu technique de ce que sont les Lego Mindstorms EV3.
Cet article n'a pas été revu depuis la publication.
Cet article a été créé par Club Brickodeurs le 6 juillet 2020.
